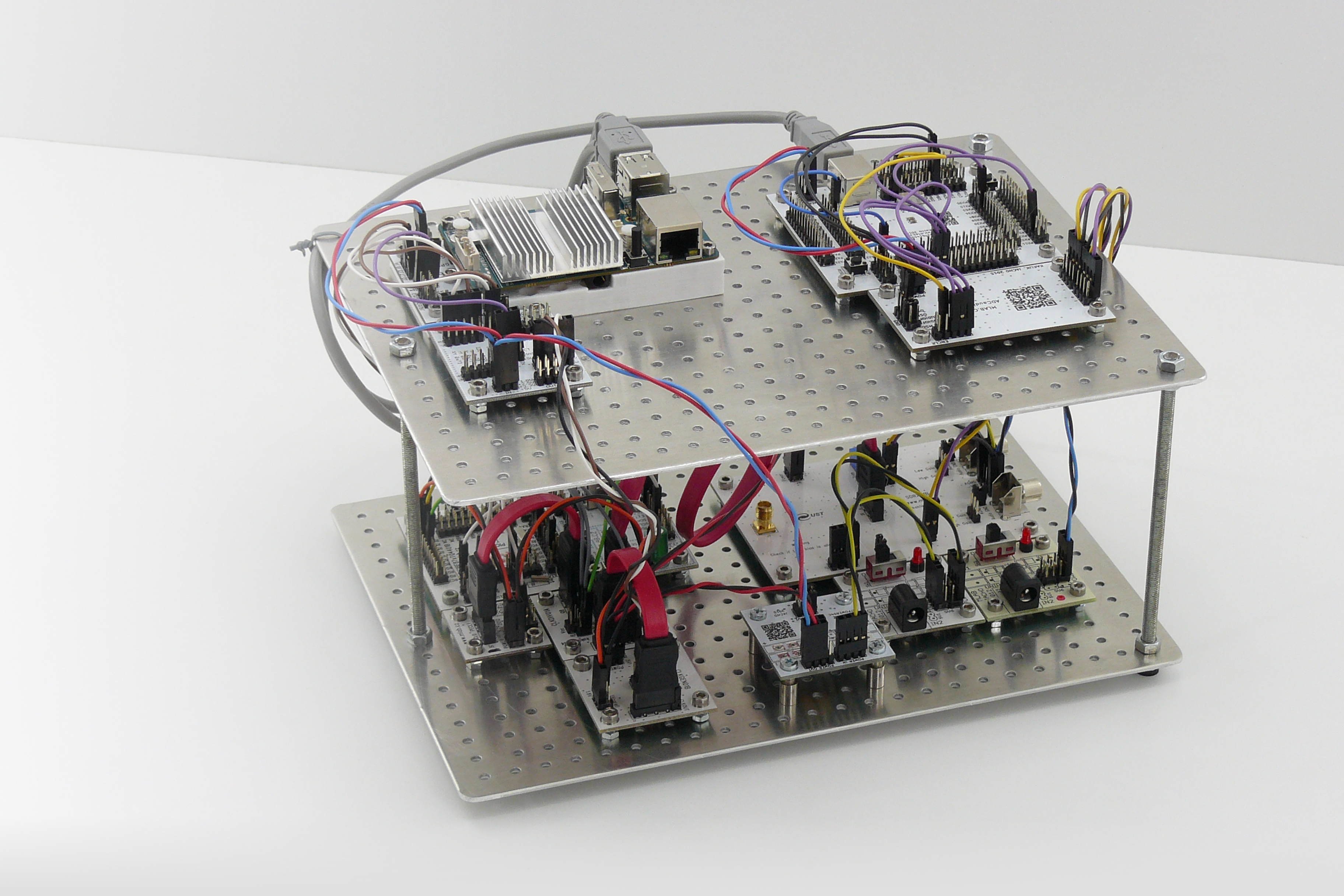

Devices can be controlled directly without using local microcontrollers with firmware
MLAB is an open-source eletronic building kit for scientists and engineers.
MLAB is committed to transparency and collaboration. All of our documentation is publicly available, ensuring that everyone can access, learn from, and build upon our work. This open-source approach fosters an inclusive community of contributors and users.
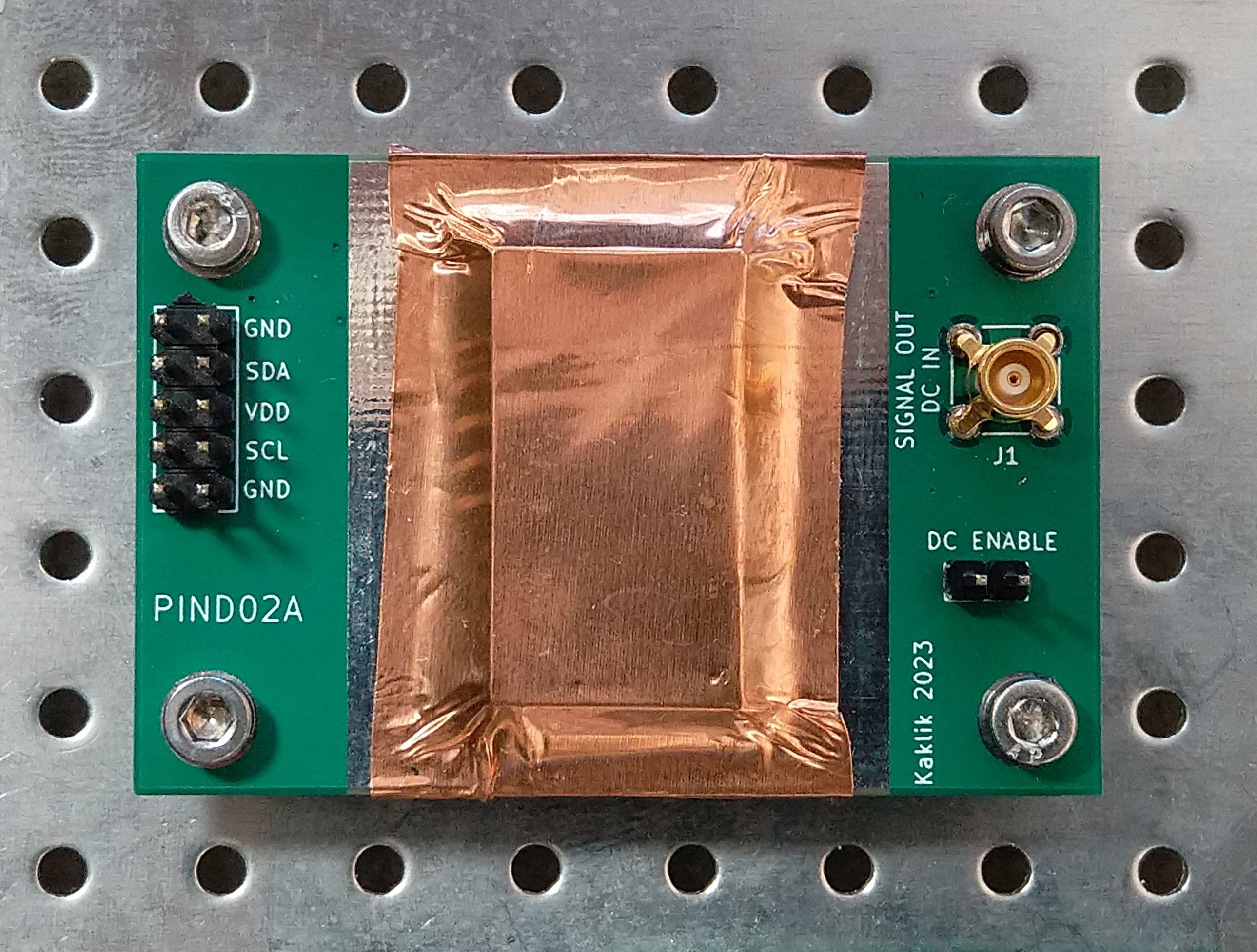
Our kit employs a modular design for simplicity and versatility. We break down complex systems into manageable modules, each containing only the necessary components to function within the larger system. Assembled on a sturdy base of aerial duralumin, these modules facilitate rapid development and enhancement of a wide range of devices.
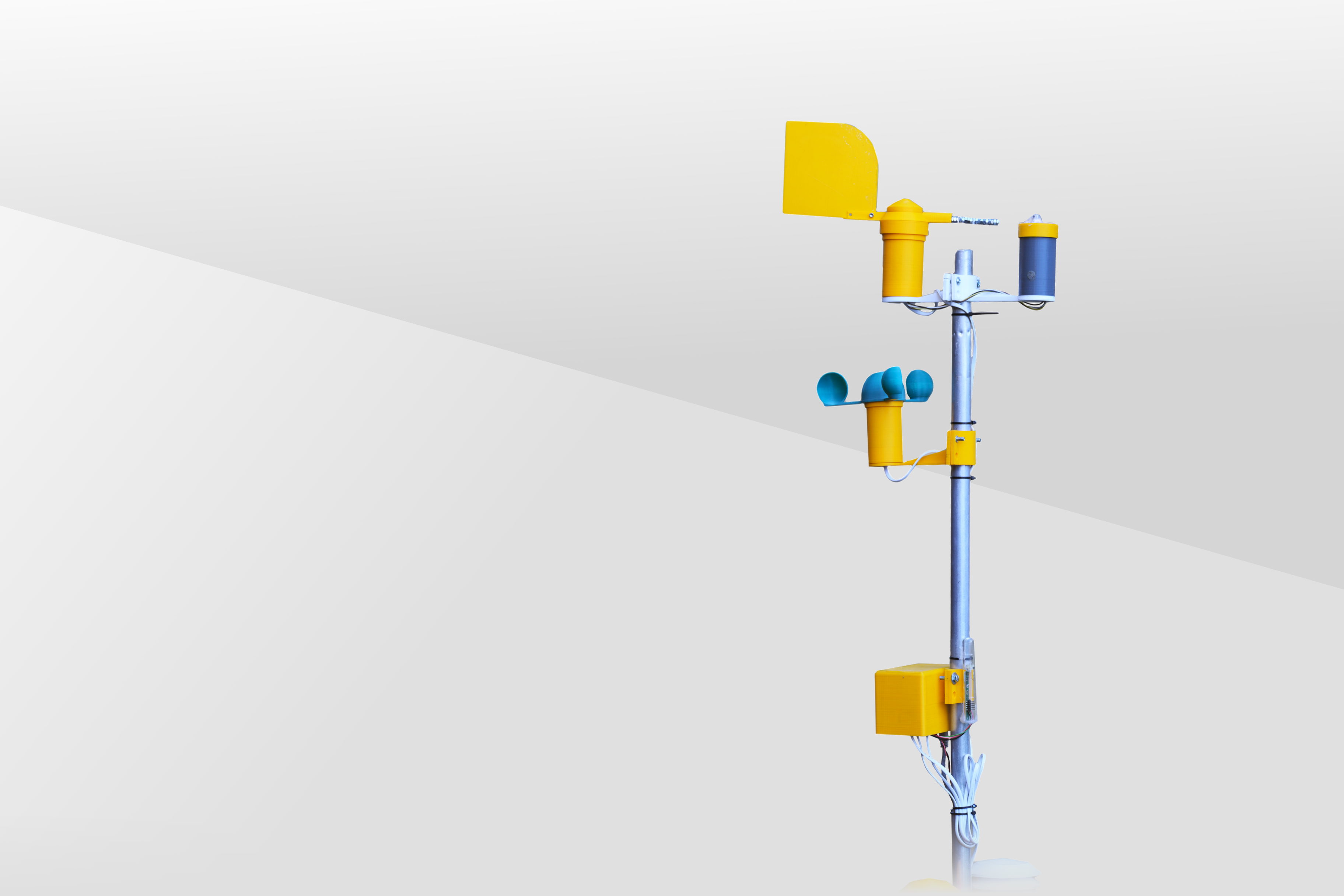
With MLAB, the possibilities are extensive. Our construction kit allows for the building of a broad array of devices and instruments, from straightforward measuring tools to sophisticated devices used in scientific experiments. This versatility makes MLAB a valuable resource across numerous fields of study and application.
MLAB construction kit contains components made by various manufacturers of sensors, microcontrollers or motor drivers. No specific manufacturer is preferred.